
How to choose between Nonius and AksIM technology
For Nonius technology, the magnetic code carrier consists of two magnetic encoder tracks. The outer track consists of an even number of alternately magnetized poles and is used for high-precision position determination. It is therefore referred to as the master track. The second inner track has one fewer pair of poles than the outer track and is therefore referred to as the Nonius track. This track is used to calculate an absolute position within one revolution of the pole disk. This is done by calculating the angular difference between the two tracks. Encoders with this technology must be calibrated before use. An alternative option to Nonius technology that does not require calibration is AksIM technology.
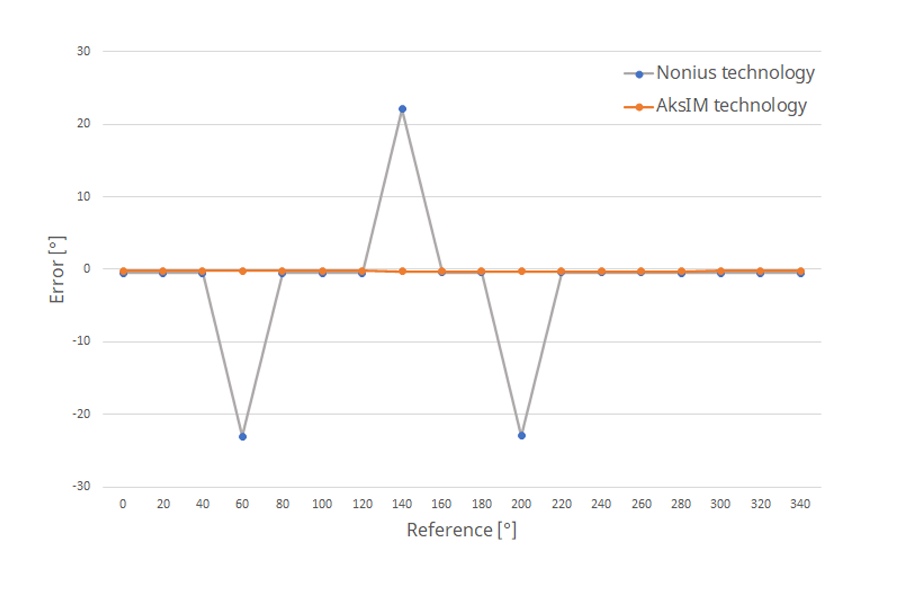
Position error of encoders with AksIM and Nonius technology during mechanical mounting changes within the mounting tolerances - no calibration
If there is a mechanical change in the assembly within the installation tolerances and the position between the readhead and the magnetic ring of the encoder changes, the encoder with AksIM technology works without problems and provides an accurate absolute position. In the same situation, Nonius technology encoder has a very large position error that can have catastrophic safety consequences. The diagram above shows the major reliability disadvantage of Nonius technology encoders, regardless of which manufacturer they come from.
The reason why Nonius technology encoders need to be calibrated is that the angular displacement between the master and slave tracks is very small, and the detection of this angle changes at the different positions between the readhead and the magnetic ring. This means that even when installed within the specified tolerances, there will always be a small difference in ride height position between encoder systems. During calibration, the encoder system records the angle of each track and updates the internal lookup table of the master track angle relative to the slave track angle. If this does not happen, the readhead will use the default look-up table, which is not matched to the encoder installation, and the absolute position will be incorrect in some parts of the curve, as shown in the graph.
AksIM product page Nonius product page